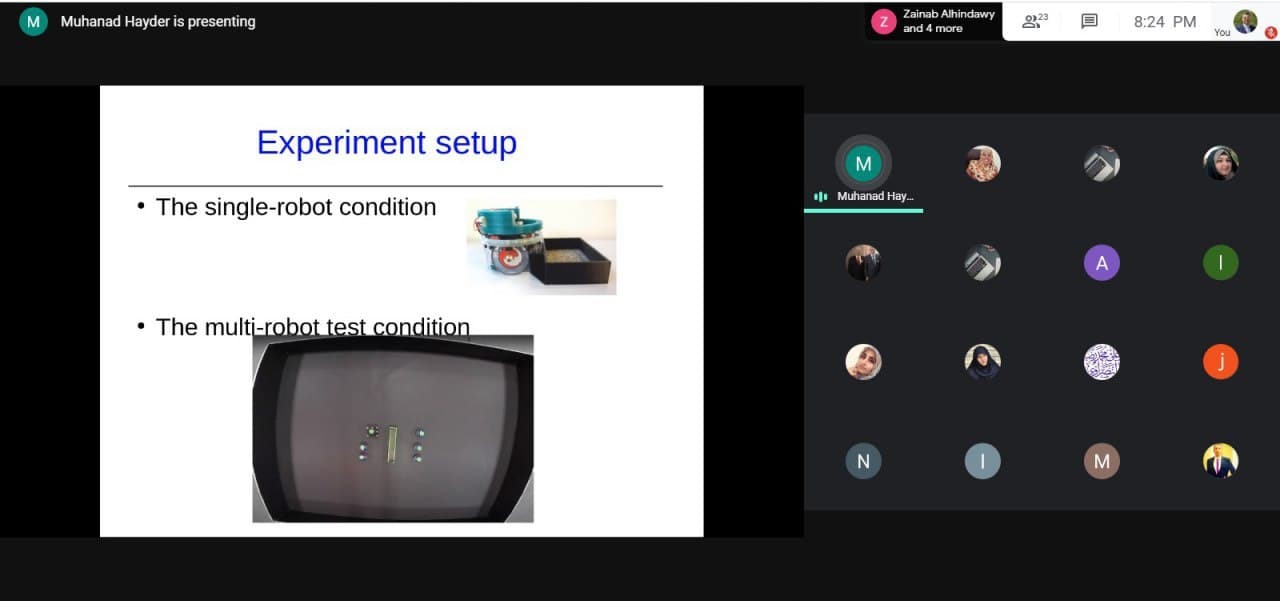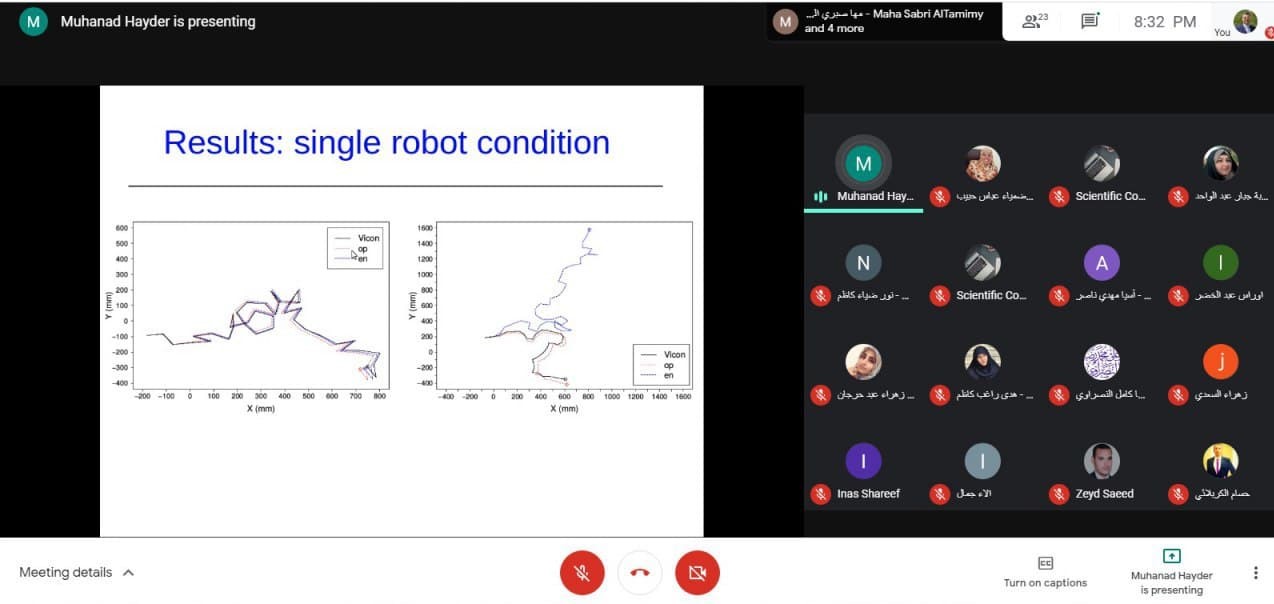
Asst. Prof. Dr. Muhannad Haidar Muhammad, a teacher in the Department of Computer Science / College of Computer Science and Information Technology, conducted an online seminar on his paper entitled “Odometry during object transport: a study with physical robots”. The study is concerned with locating robots that work collectively to transport large objects. The researcher developed a sensor that calculates the distance that the robot travels depending on comparing images of the surface the robot is walking on. Through a comparative study, the researcher found out that the sensor developed for tasks of collective transport by groups of robots outperforms the traditional sensor commonly used for locating robots. In the tests conducted by the researcher, 6 robots (Wheel encoders) were used that work collectively to transport large objects of different weights. The mission cannot be completed without the collaboration of all the robots in the group. At the same time, one (e-pucks) robot determines the path of the group to transfer the object to the final destination specified in the task