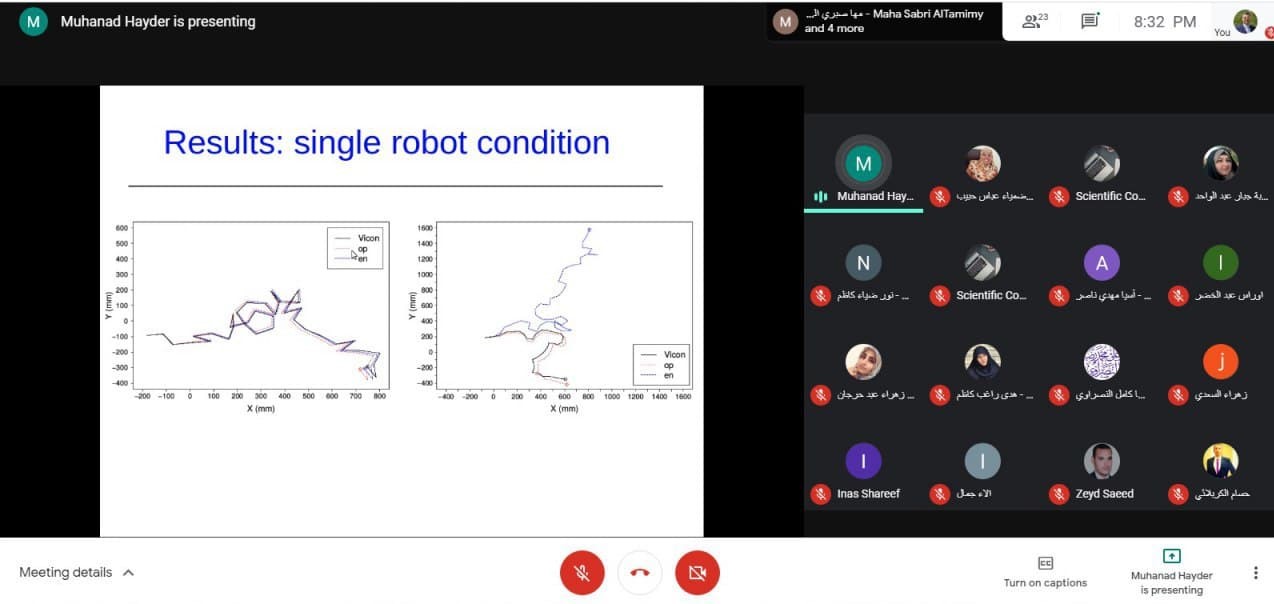
القى الكترونياً ا.م.د مهند حيدر محمد التدريسي في قسم الحاسوب/كلية علوم الحاسوب وتكنلوجيا المعلومات سمنر عن بحثه الموسوم “Odometry during object transport: a study with physical robots” والذي يعنى بدراسة تحديد مواقع الروبوتات التي تعمل بصورة جماعية لنقل الاجسام الكبيرة بصورة تعاونية. طور الباحث حساس يقوم باحتساب الازاحة التي يقطعها الروبوت اعتماداً على مقارنة صور السطح الذي يمشي عليه الروبوت. ومن خلال دراسة مقارنة، وجد الباحث ان كفائة الحساس المطور تحديداً لاجل مهمات النقل الجماعي لاسراب الروبوتات تفوق كفائة الحساس التقليدي (Wheel encoders) الشائع استخدامة في تحديد مواقع الروبوتات. في الاختبارات التي اجراها الباحث استخدام 6 روبوتات (e-pucks) تعمل بصورة جماعية لنقل اجسام كبيرة وبأوزان مختلفة لايستطيع الروبوت الواحد على انجاز المهمة الابتعاون جميع الروبوتات في المجموعة وفي نفس الوقت يقوم روبوت واحد بتحديد مسار المجموعة لنقل الجسم الى الوجية النهائية المحدده في المهمة.